|
|

|

|
| e-Pub |
Section: New Results
Human activity capture and classification
Video Face Clustering with Unknown Number of Clusters
Participants : Makarand Tapaswi, Marc T. Law, Sanja Fidler.
Understanding videos such as TV series and movies requires analyzing who the characters are and what they are doing. We address the challenging problem of clustering face tracks based on their identity. Different from previous work in this area, we choose to operate in a realistic and difficult setting where: (i) the number of characters is not known a priori; and (ii) face tracks belonging to minor or background characters are not discarded.
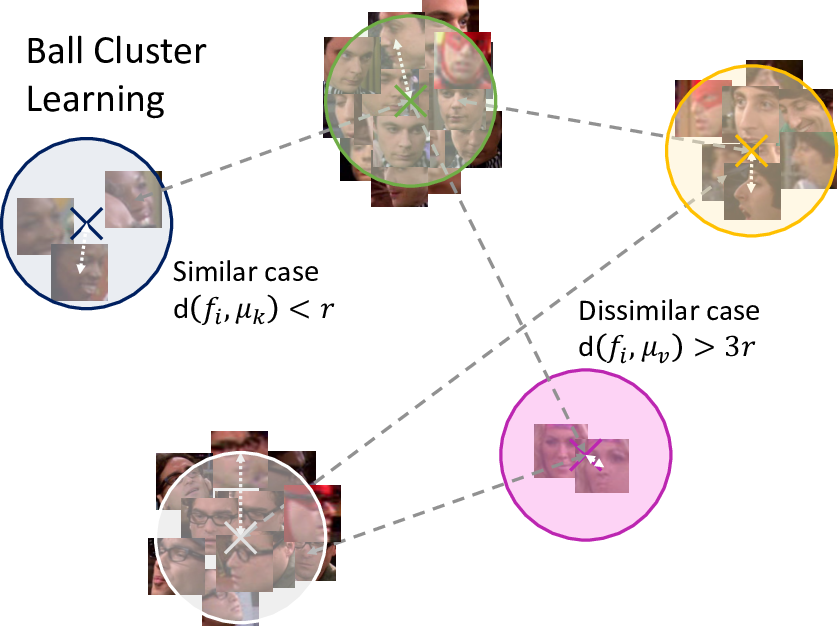
To this end, we propose Ball Cluster Learning (BCL), a supervised approach to carve the embedding space into balls of equal size, one for each cluster (see Figure 10). The learned ball radius is easily translated to a stopping criterion for iterative merging algorithms. This gives BCL the ability to estimate the number of clusters as well as their assignment, achieving promising results on commonly used datasets. We also present a thorough discussion of how existing metric learning literature can be adapted for this task. This work has been published in [22].
|
Cross-task weakly supervised learning from instructional videos
Participants : Dimitri Zhukov, Jean-Baptiste Alayrac, Ramazan Gokberk Cinbis, David Fouhey, Ivan Laptev, Josef Sivic.
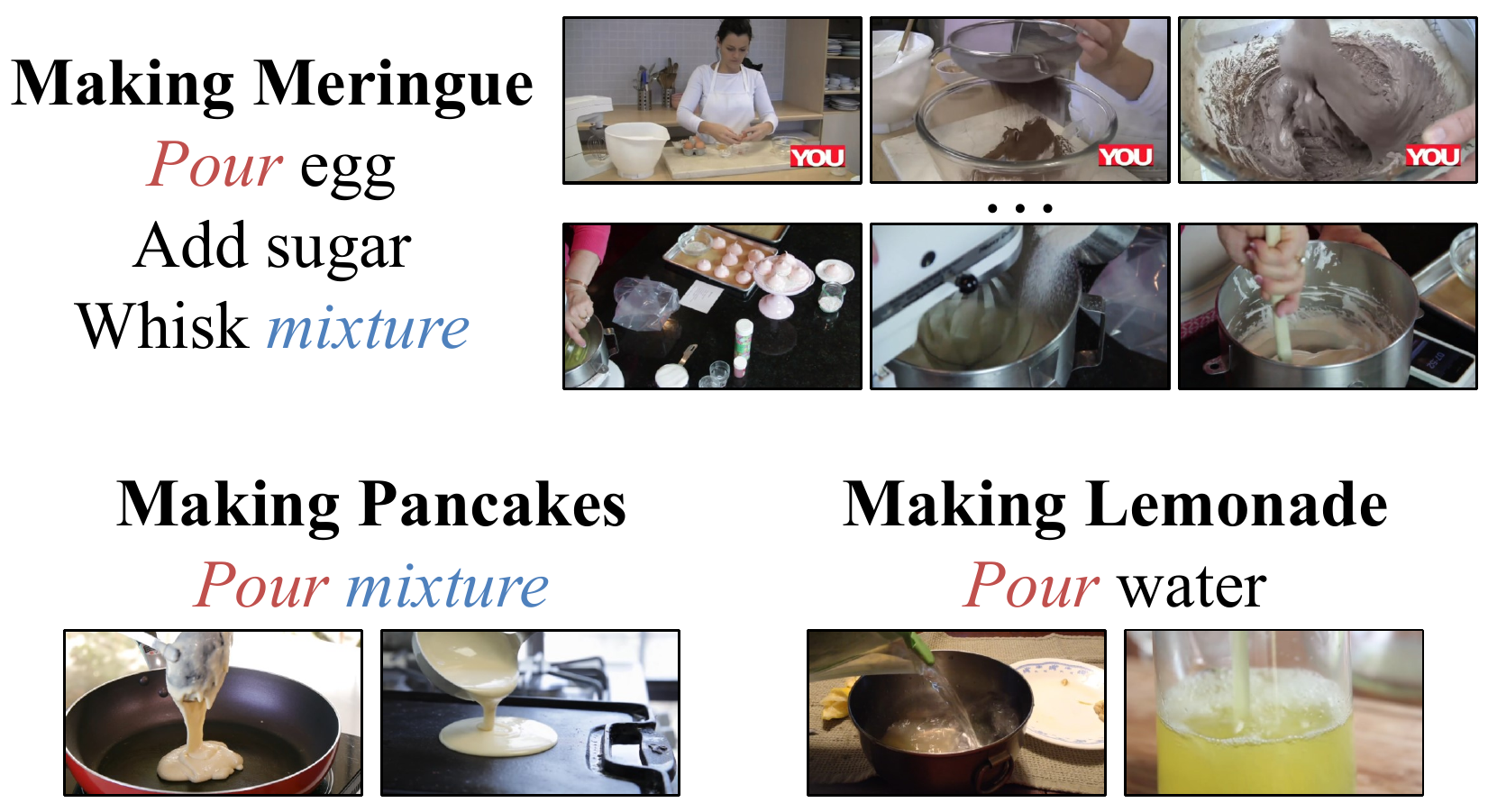
In [25], we investigate learning visual models for the steps of ordinary tasks using weak supervision via instructional narrations and an ordered list of steps instead of strong supervision via temporal annotations. At the heart of our approach is the observation that weakly supervised learning may be easier if a model shares components while learning different steps: “pour egg” should be trained jointly with other tasks involving “pour” and “egg”. We formalize this in a component model for recognizing steps and a weakly supervised learning framework that can learn this model under temporal constraints from narration and the list of steps. Past data does not permit systematic studying of sharing and so we also gather a new dataset, CrossTask, aimed at assessing cross-task sharing. Our experiments demonstrate that sharing across tasks im- proves performance, especially when done at the component level and that our component model can parse previously unseen tasks by virtue of its compositionality. Figure 11 illustrates the idea of sharing step components between different tasks.
|
Leveraging the Present to Anticipate the Future in Videos
Participants : Antoine Miech, Ivan Laptev, Josef Sivic, Heng Wang, Lorenzo Torresani, Du Tran.
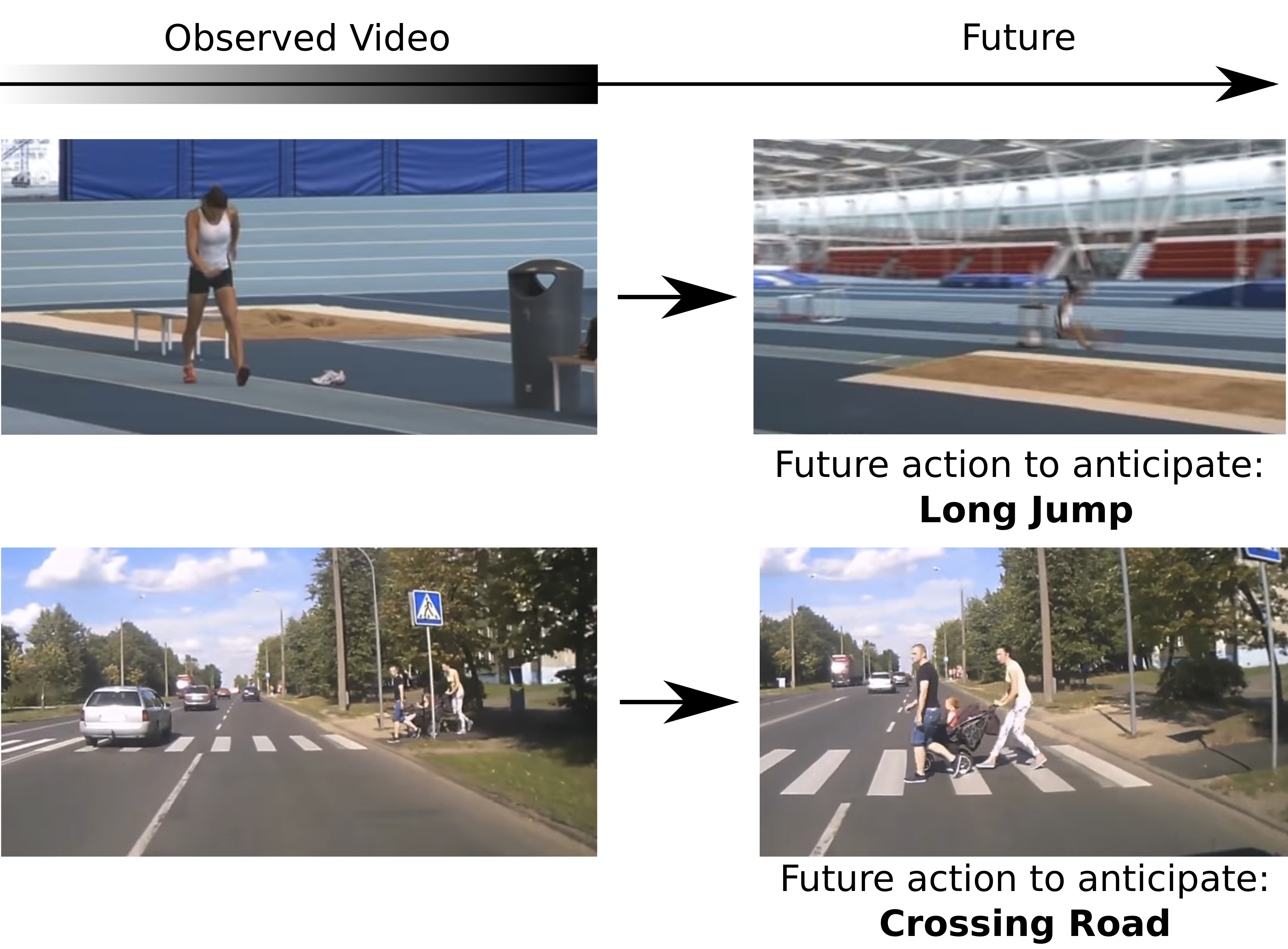
Anticipating actions before they are executed is crucial for a wide range of practical applications including autonomous driving and the moderation of live video streaming. While most prior work in this area requires partial observation of executed actions, in the paper we focus on anticipating actions seconds before they start (see Figure 12) Our proposed approach is the fusion of a purely anticipatory model with a complementary model constrained to reason about the present. In particular, the latter predicts present action and scene attributes, and reasons about how they evolve over time. By doing so, we aim at modeling action anticipation at a more conceptual level than directly predicting future actions. Our model outperforms previously reported methods on the EPIC-KITCHENS and Breakfast datasets. This paper was presented at the CVPR 2019 precognition workshop [34] and ranked second at the EPIC-KITCHENS action anticipation challenge.
|
HowTo100M: Learning a Text-Video Embedding by Watching Hundred Million Narrated Video Clips
Participants : Antoine Miech, Dimitri Zhukov, Jean-Baptiste Alayrac, Makarand Tapaswi, Ivan Laptev, Josef Sivic.
Learning text-video embeddings usually requires a dataset of video clips with manually provided captions. However, such datasets are expensive and time consuming to create and therefore difficult to obtain on a large scale. In this work, we propose instead to learn such embeddings from video data with readily available natural language annotations in the form of automatically transcribed narrations (see Figure 13). The contributions of this work are three-fold. First, we introduce HowTo100M: a large-scale dataset of 136 million video clips sourced from 1.22M narrated instructional web videos depicting humans performing and describing over 23k different visual tasks. Our data collection procedure is fast, scalable and does not require any additional manual annotation. Second, we demonstrate that a text-video embedding trained on this data leads to state-of-the-art results for text-to-video retrieval and action localization on instructional video datasets such as YouCook2 or CrossTask. Finally, we show that this embedding transfers well to other domains: fine-tuning on generic Youtube videos (MSR-VTT dataset) and movies (LSMDC dataset) outperforms models trained on these datasets alone. This work was presented at ICCV 2019 [16].
|

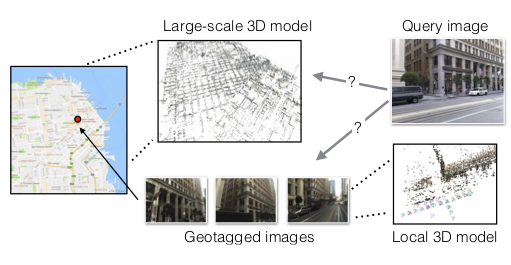
Are Large-Scale 3D Models Really Necessary for Accurate Visual Localization?
Participants : Akihiko Torii, Hajime Taira, Josef Sivic, Marc Pollefeys, Masatoshi Okutomi, Tomas Pajdla, Torsten Sattler.
Accurate visual localization is a key technology for autonomous navigation. 3D structure-based methods, as illustrated in Figure 14, employ 3D models of the scene to estimate the full 6 degree-of-freedom (DOF) pose of a camera very accurately. However, constructing (and extending) large-scale 3D models is still a significant challenge. In contrast, 2D image retrieval-based methods only require a database of geo-tagged images, which is trivial to construct and to maintain. They are often considered inaccurate since they only approximate the positions of the cameras. Yet, the exact camera pose can theoretically be recovered when enough relevant database images are retrieved. In [8], we demonstrate experimentally that large-scale 3D models are not strictly necessary for accurate visual localization. We create reference poses for a large and challenging urban dataset. Using these poses, we show that combining image-based methods with local reconstructions results in a higher pose accuracy compared to state-of-the-art structure-based methods, albeight at higher run-time costs. We show that some of these run-time costs can be alleviated by exploiting known database image poses. Our results suggest that we might want to reconsider the need for large-scale 3D models in favor of more local models, but also that further research is necessary to accelerate the local reconstruction process.
|
End-to-End Learning of Visual Representations from Uncurated Instructional Videos
Participants : Antoine Miech, Jean-Baptiste Alayrac, Lucas Smaira, Ivan Laptev, Josef Sivic, Andrew Zisserman.
Annotating videos is cumbersome, expensive and not scalable. Yet, many strong video models still rely on manually annotated data. With the recent introduction of the HowTo100M dataset, narrated videos now offer the possibility of learning video representations without manual supervision. In this work we propose a new learning approach, MIL-NCE, capable of addressing misalignments inherent to narrated videos (see Figure 15). With this approach we are able to learn strong video representations from scratch, without the need for any manual annotation. We evaluate our representations on a wide range of four downstream tasks over eight datasets: action recognition (HMDB-51, UCF-101, Kinetics-700), text-to-video retrieval (YouCook2, MSR-VTT), action localization (YouTube-8M Segments, CrossTask) and action segmentation (COIN). Our method outperforms all published self-supervised approaches for these tasks as well as several fully supervised baselines. This preprint [32] is currently under review.
|

Synthetic Humans for Action Recognition from Unseen Viewpoints
Participants : Gul Varol, Ivan Laptev, Cordelia Schmid, Andrew Zisserman.
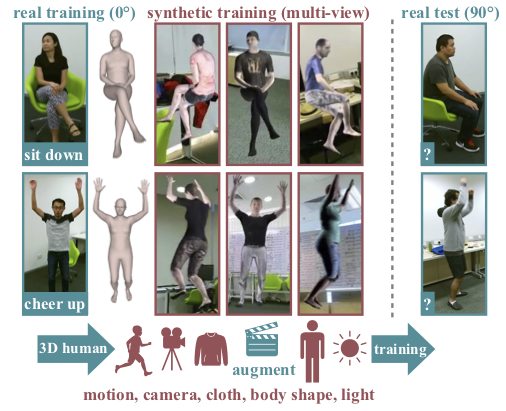
In [35], the goal is to improve the performance of human action recognition for viewpoints unseen during training by using synthetic training data. Although synthetic data has been shown to be beneficial for tasks such as human pose estimation, its use for RGB human action recognition is relatively unexplored. We make use of the recent advances in monocular 3D human body reconstruction from real action sequences to automatically render synthetic training videos for the action labels. We make the following contributions: (i) we investigate the extent of variations and augmentations that are beneficial to improving performance at new viewpoints. We consider changes in body shape and clothing for individuals, as well as more action relevant augmentations such as non-uniform frame sampling, and interpolating between the motion of individuals performing the same action; (ii) We introduce a new dataset, SURREACT, that allows supervised training of spatio-temporal CNNs for action classification; (iii) We substantially improve the state-of-the-art action recognition performance on the NTU RGB+D and UESTC standard human action multi-view benchmarks; Finally, (iv) we extend the augmentation approach to in-the-wild videos from a subset of the Kinetics dataset to investigate the case when only one-shot training data is available, and demonstrate improvements in this case as well. Figure 16 presents an illustration of the approach.